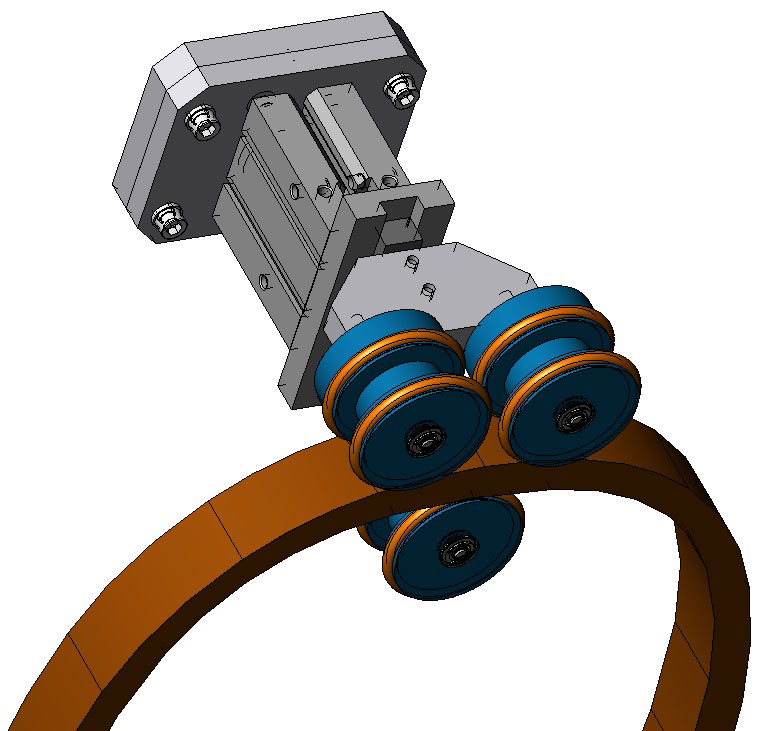
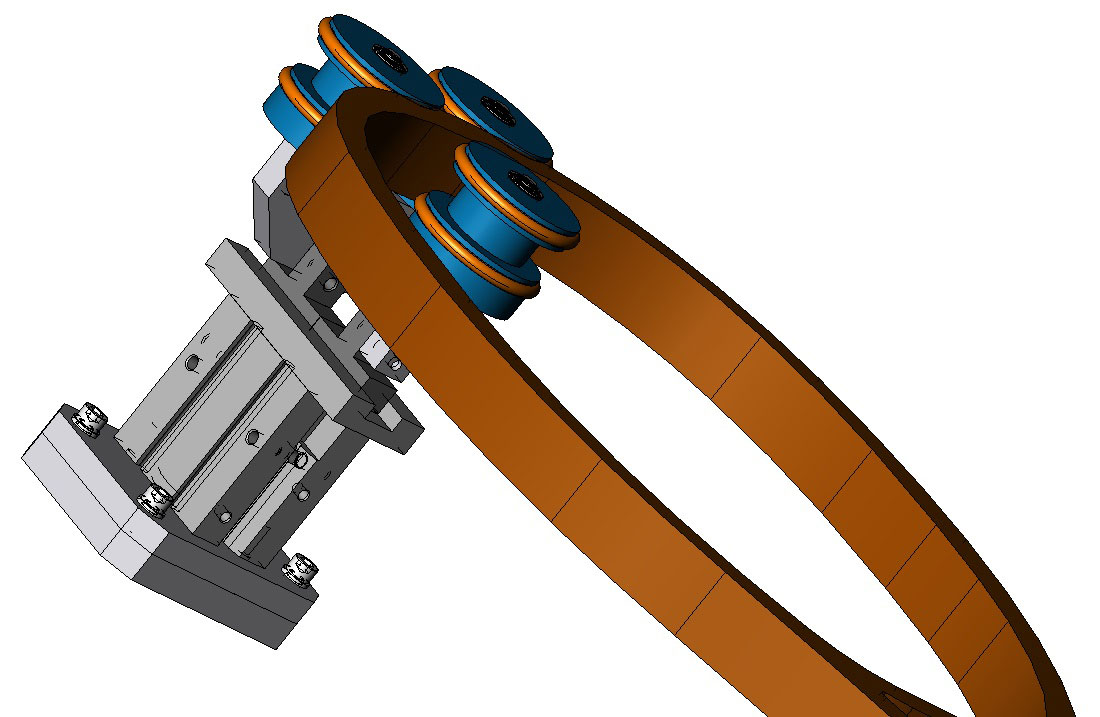





楕円形を3つのローラーで挟み込む搬送用ハンド
ラケットなど楕円形のワークを搬送するハンドです。
上部2つ、下部1つのローラーで挟みこむことで安定したグリップができます。
特徴
ワークのセンタリング精度を向上させています。

楕円頂上を3つのローラーで挟むことで、センタリング精度を上げています。
ワーク表面にキズが付かないよう工夫しています。

各ローラーには柔らかいウレタンベルトを2本ずつ装着し、ワーク表面にキズが付かないように防止しています。
ロボットハンド集をダウンロードできます!
当サイトで掲載しているロボットハンドを収録した『ロボットハンド集』(PDFデータ)をダウンロードできます。
『ロボットハンド集』をご希望の方は必要事項をご入力の上[送信]ボタンを押して下さい。
ご指定のメールアドレスにダウンロードURLをお送りします。