

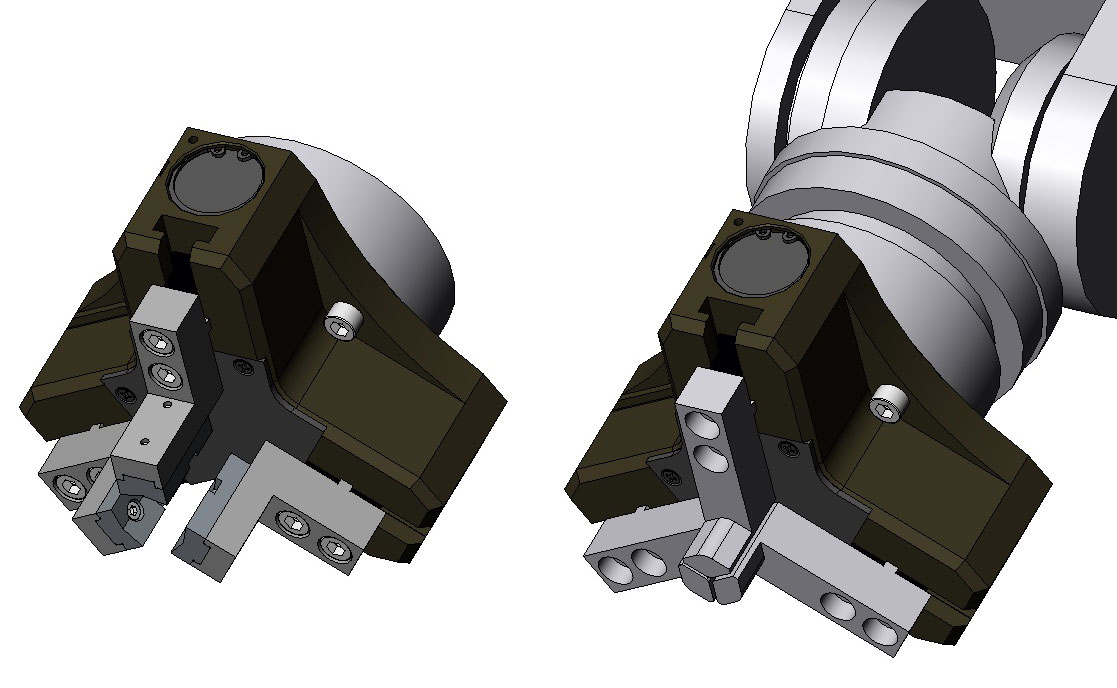

三つの爪で挟む中量向け円筒形ワーク
中重量(1~2キログラム程度)で円筒形のワークを搬送するハンドです。
対象ワークの種類(外径、内径、長さ、重量、形状)が複数あるため、3つ爪の交換で対応幅を確保しています。
特徴
ワークのセンタリング精度を向上させています。
爪を3本使用することで、円筒形のワークは正確にセンタリング出来ます。
ワークの大きさに応じて、ワーク種類数を増やせます。

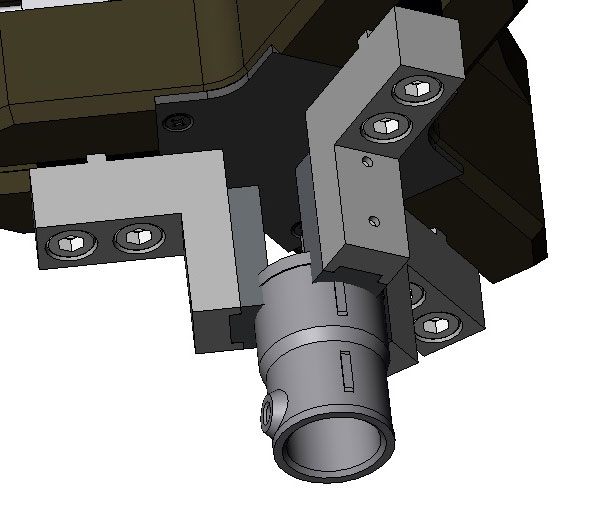
ワークの内側で保持するタイプの爪と外側をつかむタイプの爪があり、搬送するワークの大きさに合わせて切替交換することにより、幅広いワーク種類を網羅しています。
ワークへのキズ防止の工夫をしています。
ワークにキズが付かないように柔らかく、且つ消耗の少ないエンジニアリングプラスチックを使用しています。
ロボットハンド集をダウンロードできます!
当サイトで掲載しているロボットハンドを収録した『ロボットハンド集』(PDFデータ)をダウンロードできます。
『ロボットハンド集』をご希望の方は必要事項をご入力の上[送信]ボタンを押して下さい。
ご指定のメールアドレスにダウンロードURLをお送りします。