



二つの爪で挟む軽量向け円筒形ワーク
比較的軽量(数百グラム)で円筒形のワークを搬送するハンドです。
ワーク先端のR部に合った形状の2つ爪で挟む構造です。
特徴
挟むことで自然にセンタリングします。
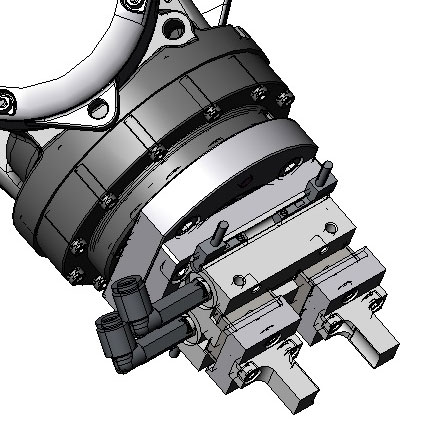
ワークのセット位置の精度を上げるには、ワークのセンターをきちんと掴むことが重要なので、爪先端をワークのR部と合わせる形状にしています。
ワークへのキズ防止の工夫をしています。
ワークにキズが付かないように柔らかく、且つ消耗の少ないエンジニアリングプラスチックを使用しています
。
ロボットハンド集をダウンロードできます!
当サイトで掲載しているロボットハンドを収録した『ロボットハンド集』(PDFデータ)をダウンロードできます。
『ロボットハンド集』をご希望の方は必要事項をご入力の上[送信]ボタンを押して下さい。
ご指定のメールアドレスにダウンロードURLをお送りします。