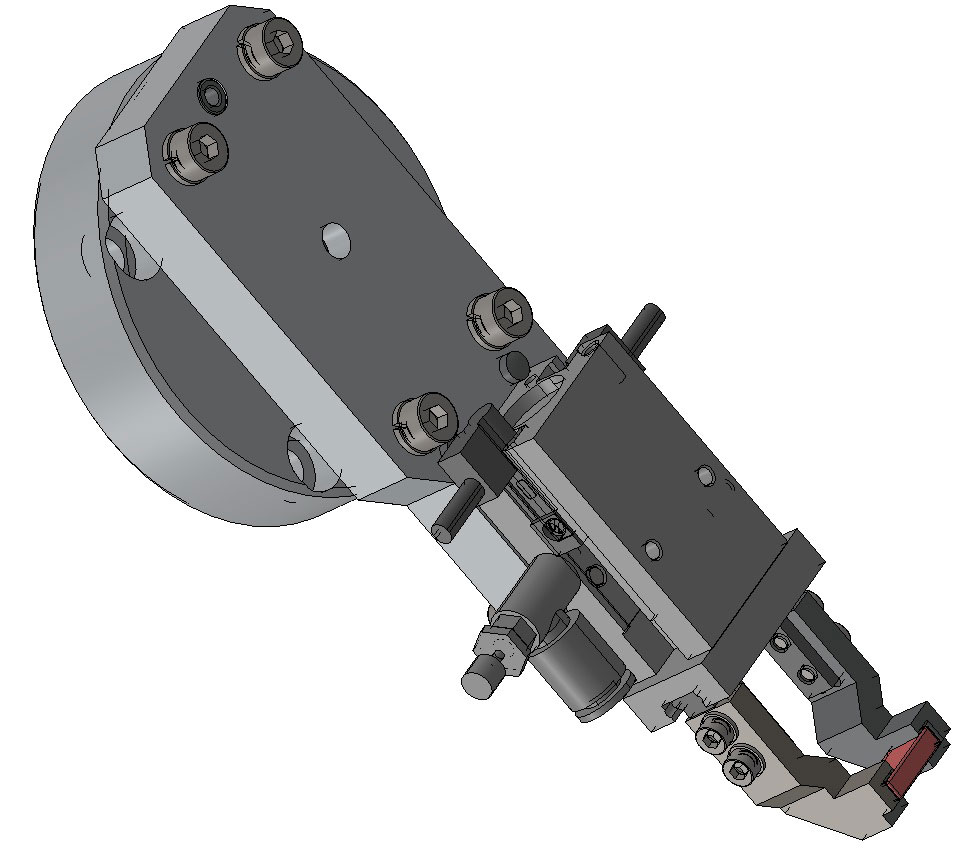



精密部品挿入ハンド
精密なプラスチック製パーツを部品に挿入するハンドです。
特徴
ワークに余分な負荷をかけず、最適な圧力で保持できます。

エアーチャック(シリンダー)を採用することで、ワーク保持力を細かく設定することが可能となり、最適な圧力で保持できます。
ロボットハンド集をダウンロードできます!
当サイトで掲載しているロボットハンドを収録した『ロボットハンド集』(PDFデータ)をダウンロードできます。
『ロボットハンド集』をご希望の方は必要事項をご入力の上[送信]ボタンを押して下さい。
ご指定のメールアドレスにダウンロードURLをお送りします。